
 Архив
Архив

Повышаем устойчивость движения колесного трактора
В мировой практике в настоящее время отмечается расширение парка энергонасыщенных универсально-пропашных тракторов интегральной схемы со всеми ведущими и управляемыми колесами, которые способны выполнять операции в составе широкозахватных комбинированных машинно-тракторных агрегатов (МТА) с передней и задней навесками машин.
Однако указанные агрегаты имеют низкую устойчивость движения, поэтому одной из первоочередных задач является повышение устойчивости комбинированных МТА, в том числе при криволинейном движении
Проведены экспериментальные исследования комбинированного навесного агрегата при работе на поворотной полосе различными способами
(I – передние управляемые колеса; II – передние и задние управляемые колеса с синхронным изменением угла поворота колес в разные стороны относительно остова трактора; III – комбинированный способ поворота с синхронным изменением угла поворота колес в одну сторону относительно остова трактора при входе в поворот и передними управляемыми колесами на участке установившегося поворота).
Выявлено, что реализация поворота комбинированным способом способствует равномерной загрузке мостов трактора, снижению их вертикальных ускорений на 31–65% и ускорений поступательного движения МТА на 38–63% в сравнении с традиционными способами. Результаты замеров абсциссы x и ординаты y кругового беспетлевого поворота, соответствующих траектории, очерчиваемой кинематическим центром, при различных способах движения на повороте, показали, что комбинированный способ поворота является оптимальным для сохранения устойчивости движения. Он обеспечил снижение поперечного на 0,7–1,7 м и продольного на 2,20–2,46 м смещения комбинированного МТА в сравнении со способом поворота передними колесами и, соответственно, на 0,27–0,53 м и на 0,6–0,9 м в сравнении со способом поворота передними и задними управляемыми колесами. Площадь поворотной полосы уменьшилась в среднем соответственно на 28 и 10%.
Машинно-тракторные агрегаты (МТА) при работе в полевых условиях совершают ежедневно путь значительной длины. При этом рабочие ходы сопровождаются и чередуются с холостыми заездами и поворотами. Тот или иной способ движения на поворотной полосе выбирается в зависимости от агротехнических требований, типа и состава агрегата, а также размеров участка, на котором выполняется работа. Причем в каждом способе движения на поворотной полосе заложены элементы кругового беспетлевого поворота.
Криволинейное движение, осуществляемое на поворотной полосе, является наиболее сложным элементом кинематики агрегата, так как отдельные его точки движутся с различной скоростью и описывают различные траектории. Колесный МТА не может мгновенно перейти от прямолинейного движения к движению по дуге окружности (в частности, не может совершать поворот на деформируемой почве с минимально допустимым радиусом Rт) и от движения по дуге окружности к прямолинейному движению. Он проходит участки с переменными радиусами кривизны от R = ∞ до R = Rд – при входе в поворот и от R = Rд до R = ∞ – при выходе из поворота. Наиболее динамически нагруженными являются участки «вход в поворот» и «установившийся поворот», поэтому, как правило, при экспериментальных исследованиях изучают указанные этапы поворота.
На поворотной полосе, особенно при входе в поворот, происходит более значительное, чем на других участках поля, отклонение МТА от заданной траектории движения вследствие бокового увода и скольжения шин, что также способствует увеличению его динамической нагруженности, уплотнению и разрушению почвенной структуры, снижает плодородие почвы, поэтому для повышения урожайности культур необходимо снижать площадь уплотнения.
Очевидно, что для оценки устойчивости движения МТА недостаточно знать значение радиуса Rд, необходимо знать еще величины абсциссы x и ординаты y поворотной полосы, на которой агрегат может развернуться.
С целью получения полного представления о реальных рабочих процессах были проведены экспериментальные исследования комбинированного МТА на базе интегрального универсально-пропашного трактора со всеми управляемыми колесами в полевых условиях на деформируемом основании, при совершении поворота на поворотной полосе с поднятыми в транспортное положение орудиями. Траектория движения соответствовала круговому беспетлевому повороту.
Преимущество комбинированных агрегатов перед агрегатами одноцелевого назначения весьма существенно. Они обеспечивают совмещение операций за один проход агрегата, в результате чего сокращаются сроки проведения работ, повышается их качество, снижаются затраты рабочего времени и средств. Использование таких агрегатов позволяет в несколько раз сократить число проходов по полю трактора и уменьшить уплотнение почвы.
Производительность агрегата на базе колесного трактора с фронтальной и задней навесками машин на предпосевной обработке почвы и посеве увеличивается на 30%, расход топлива на единицу площади снижается почти в два раза по сравнению с однооперационными МТА. Совмещение операций снижает нагрузку на почву и способствует увеличению урожайности на 4–7%.
Использование комбинированного широкозахватного МТА увеличивает загрузку двигателя энергонасыщенного интегрального трактора от 55–65 до 80%, что позволяет ему работать в зоне оптимальных характеристик, при этом производительность повышается, а расход топлива снижается.
При использовании передней и задней навесных систем более равномерно распределяется нагрузка по мостам трактора, но при этом увеличение массово-геометрических свойств приводит к существенному изменению кинематических и динамических характеристик МТА, влияющих на устойчивость его движения.
Особенно это проявляется при криволинейном движении по деформируемой почве на поворотной полосе, где наблюдается более значительное отклонение от желаемой траектории движения, в том числе зачастую занос, увеличиваются радиус поворота и площадь поворотной полосы.
Препятствием в расширении применения агрегатов с передними навесными системами является то, что они не обладают достаточной устойчивостью при криволинейном движении, поэтому одной из первоочередных задач является поиск путей повышения их устойчивости при повороте.
В качестве объекта испытаний, на котором была реализована предлагаемая методика, выбран энергонасыщенный универсально-пропашной трактор интегральной схемы класса 2 со всеми ведущими и управляемыми одинакового размера колесами конструкции ЛТЗ-155.
При проведении испытаний в реальных полевых условиях трактор комплектовался как комбинированный МТА навесными широкозахватными передним и задним навесными орудиями по схеме КРШ-8,1 + НП-5,4 + ЛТЗ-155 + КРШ-8,1 с целью обработки междурядий пропашных культур. Для оценки степени влияния на устойчивость движения собственных свойств трактора были также поставлены опыты с одиночным трактором.
Трактор оборудовался опытной и серийной системой рулевого управления. Поворот осуществлялся различными кинематическими способами:
I – передние управляемые относительно остова колеса;
II – передние и задние управляемые колеса с синхронным изменением угла поворота колес в разные стороны относительно остова трактора;
III – комбинированный способ поворота с синхронным изменением угла поворота колес в одну сторону относительно остова трактора при входе в поворот («краб») и передними управляемыми колесами на участке установившегося движения.
Результаты экспериментов показали, что с ростом скорости движения при круговом беспетлевом повороте комбинированного МТА из-за увеличения ударных нагрузок со стороны неровностей почвы существенно увеличиваются вертикальные, горизонтальные и угловые колебания агрегата в продольно-вертикальной плоскости при всех рассматриваемых способах поворота. МТА, совершающий поворот комбинированным способом, «смягчает» динамические процессы при взаимодействии ведущих колес трактора с почвой, практически не реагирует на угловые колебания в продольно-вертикальной плоскости, что также обуславливает устойчивость крутящих моментов.
Более плавное изменение, снижение величин и амплитуд крутящих моментов, вертикальных, продольных, инерционных и боковых сил, касательных сил тяги приводят к уменьшению буксования ведущих колес. При этом увеличивается сопротивление сдвигу колеса и моста в целом в поперечном направлении.
Равномерная загрузка мостов трактора при повороте комбинированным способом III, снижение, например, среднеквадратических вертикальных ускорений заднего моста на 47–66% в сравнении со способом поворота I и на 43–61% –со способом поворота II (рис. 1)
способствуют гашению угловых колебаний в продольно-вертикальной плоскости.
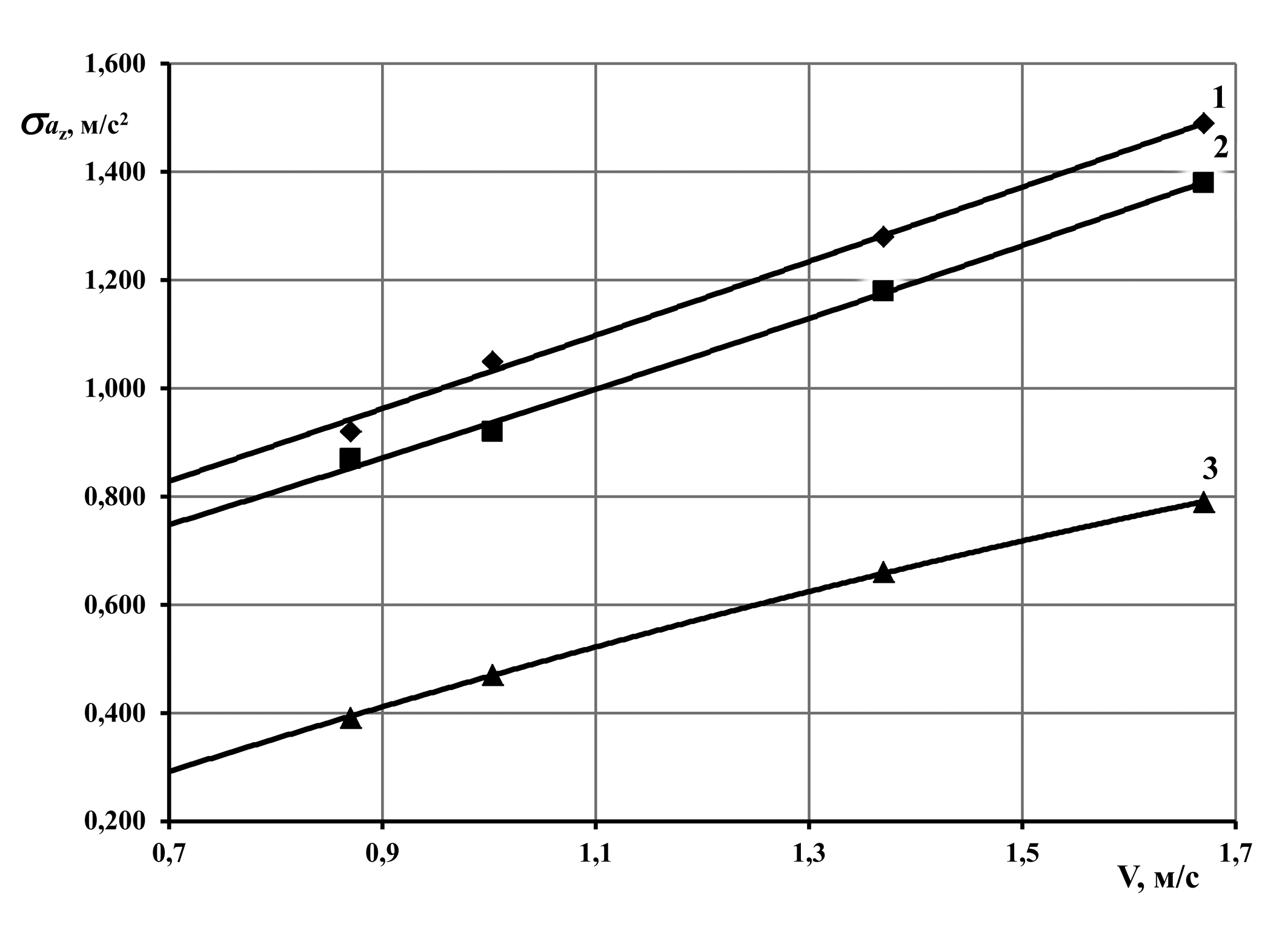
Рис. 1. Зависимость среднеквадратических вертикальных ускорений заднего
моста трактора комбинированного МТА от скорости движения: 1 – способ поворота I;
2 – способ поворота II; 3 – способ поворота III
Вследствие уменьшения колебаний мостов трактора в вертикальном направлении снижаются боковые составляющие сил, действующих со стороны неровностей почвы, выравниваются поступательные скорости отстающего и забегающего колес, повышается их сопротивляемость боковому уводу и скольжению из-за меньшей разгрузки, и вследствие этого сохраняется заданная траектория движения. Этому также способствует увеличение равномерности поступательного движения. Среднеквадратические ускорения поступательного движения МТА на повороте уменьшаются при этом на 48–61% в сравнении со способом I и на 44–56% –со способом II (рис. 2).
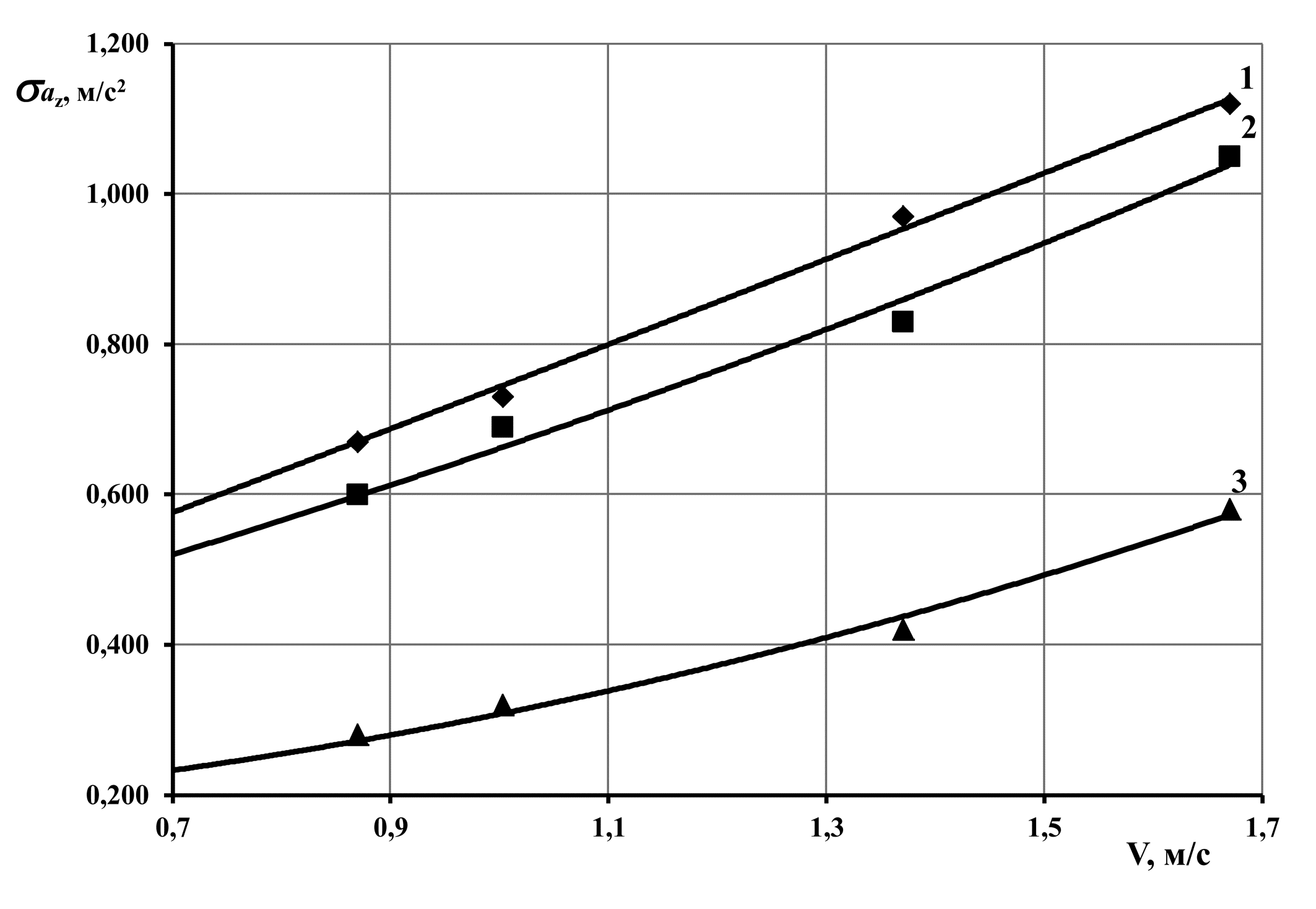
Рис. 2. Зависимость среднеквадратических горизонтальных ускорений
комбинированного МТА от скорости движения: 1 – способ поворота I; 2 – способ
поворота II; 3 – способ поворота III
Все это улучшает условия труда тракториста, снижая напряженность его работы и усилия по поддержанию желаемой траектории движения, и дает основание сделать вывод об улучшении управляемости и устойчивости криволинейного движения машинно-тракторного агрегата.
Из анализа результатов экспериментов видно, что осуществление поворота задних ведущих колес отрицательно влияет на устойчивость, так как составляющие силы тяги, которые возникают при повороте колес, приводят к увеличению боковой силы задней оси, что особенно проявляется при неустановившемся режиме движения, когда изменяются углы поворота управляемых колес, то есть при входе в поворот.
Для сравнения: при изменении скорости движения комбинированного МТА при культивации с v = 1,2 м/c до v = 2,5 м/с вертикальные ускорения изменяются в пределах 0,5–1,3 м/с2, а горизонтальные – 0,38–0,9 м/с2, что подтверждает вывод о динамичности процесса криволинейного движения МТА.
На рисунке 3 приведены зависимости действительного радиуса поворота интегрального универсально-пропашного трактора и комбинированного широкозахватного МТА на его базе от скорости движения при повороте способом I, а на рисунке 4 – при повороте способом II.
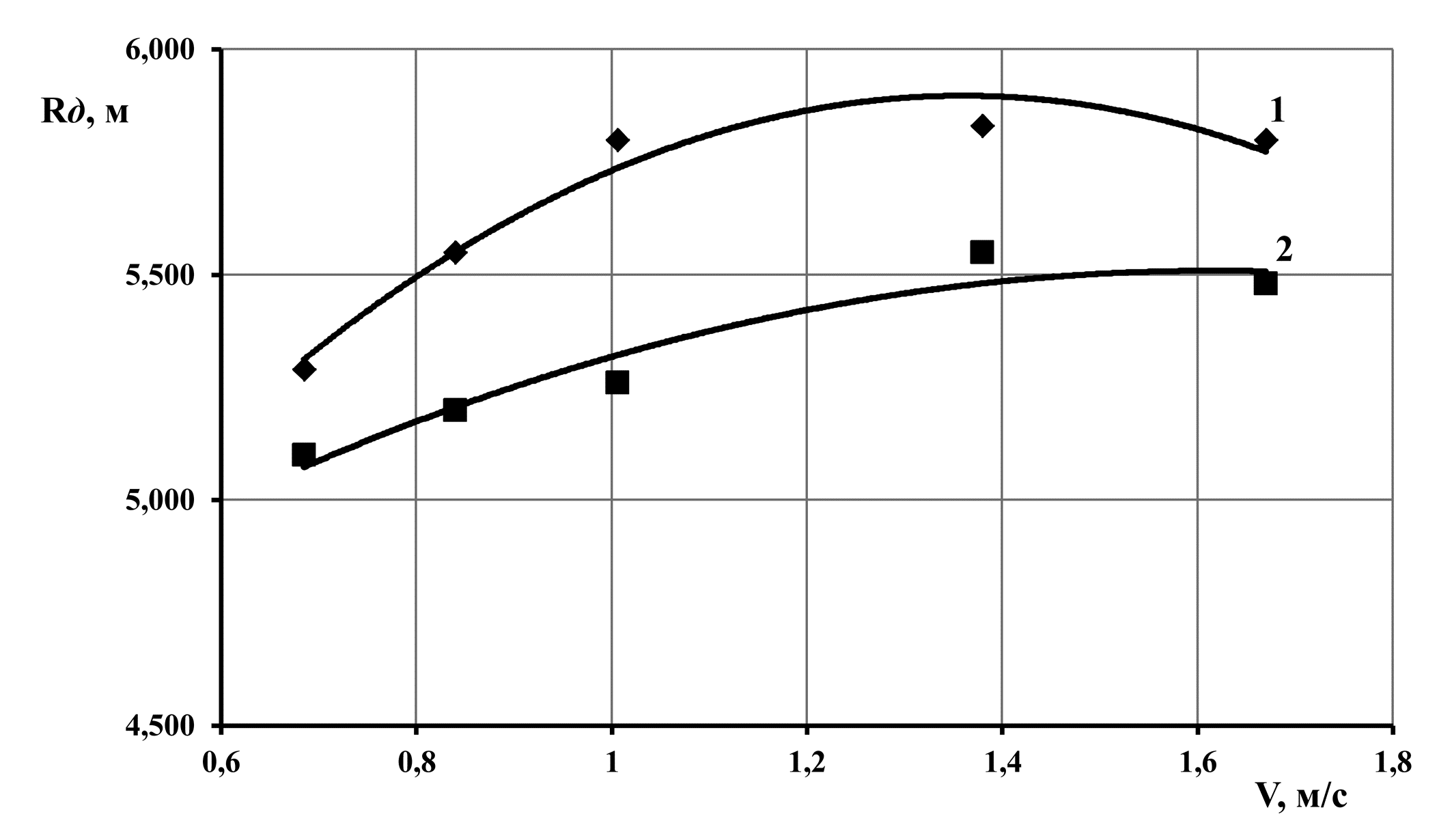
Рис. 3. Зависимость действительного радиуса поворота при способе I от скорости
движения: 1 – МТА; 2 – трактор
Как видно из данных, приведенных на рисунках 3 и 4, с ростом скорости движения интенсивность изменения радиусов поворота снижается за счет большего запаса кинетической энергии, позволяющего лучше преодолевать динамические воздействия микропрофиля опорной поверхности. Рост радиусов поворота трактора и МТА с увеличением их скорости движения происходит из-за увеличения центробежной силы инерции, частоты динамического воздействия микропрофиля почвы на колеса, среднеквадратических ускорений вертикальных колебаний мостов, приводящих к их разгрузке, ухудшению сцепления колес с почвой, что вызывает возрастание боковых реакций на колесах трактора.
При скоростях движения трактора и МТА свыше v = 1,37 м/с при повороте передними колесами угол отклонения продольной оси трактора на участке установившегося движения возрастает за счет бокового скольжения задней оси под действием момента от разности касательных сил тяги и центробежной силы инерции. Следовательно, для устранения скольжения задней оси трактора требуется создание большего поворачивающего момента за счет поворота управляемых колес, что приведет к уравновешиванию отклоняющего момента. Меньшие значения радиуса поворота на более высоких скоростях движения не свидетельствуют о лучшей устойчивости, а говорят о том, что из-за бокового заноса задней оси трактор поворачивается с меньшим радиусом и поэтому менее устойчив против скольжения (рис. 3).
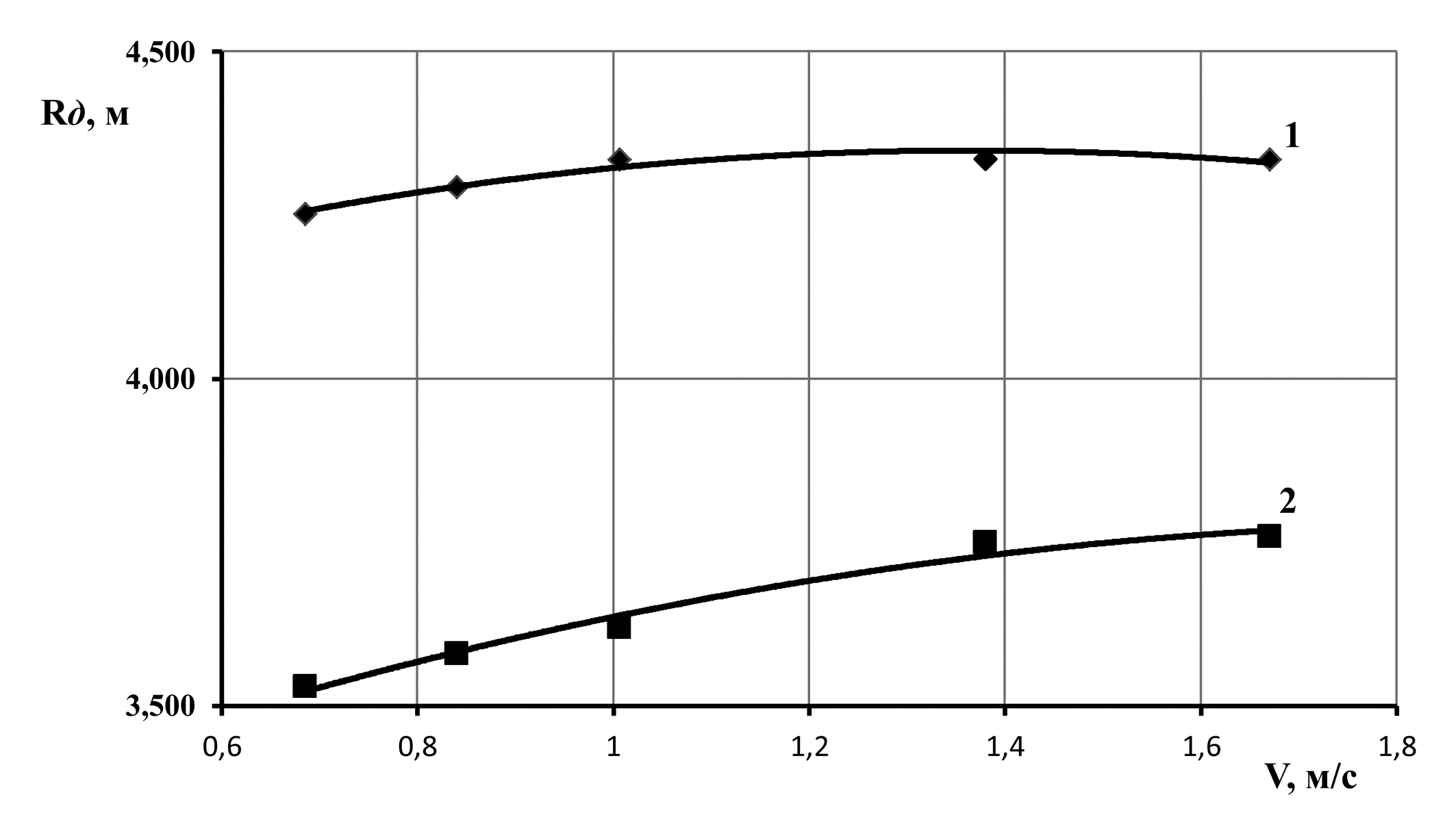
Рис. 4. Зависимость действительного радиуса поворота при способе II от скорости
движения: 1 – МТА; 2 – трактор
Из анализа зависимости минимального радиуса поворота комбинированного агрегата от скорости движения при повороте способом II (рис. 4) выявлено, что в данном случае наблюдается боковое скольжение задней оси трактора только при скоростях движения свыше v = 1,8 м/с вследствие наличия дополнительного поворачивающего момента за счет поворота задних управляемых колес, снижения неравномерности перераспределения касательных сил тяги между колесами заднего моста, обусловленное увеличением значений коэффициента сцепления колес с почвой, то есть большей однородностью поверхности под задними колесами, которые движутся по следу, укатанному передними колесами. Вследствие этого повышается средняя скорость поступательного движения МТА.
В данном случае также наблюдается увеличение радиуса поворота с повышением скорости поступательного движения, обусловленное теми же факторами, что и при повороте способом I. Но при повороте передними колесами зависимости минимальных радиусов поворота от скорости движения растут более интенсивно, чем при повороте способом II , что также указывает на меньшую устойчивость трактора против заноса.
Наличие орудий передней и задней навесных систем приводит к увеличению нормальных нагрузок на колеса трактора, что ведет, с одной стороны, также к увеличению сцепного веса, а с другой – центробежной силы инерции, приводящей к изменению динамических радиусов ведущих колес, положения центра тяжести. При этом возрастающие величины боковых реакций на колесах трактора в значительной степени изменяют траекторию его движения, увеличивая радиус поворота. Наличие орудий способствует увеличению как вертикальной, продольной, боковой и касательной сил, так и возрастанию их колебаний.
Так, например, при повороте отдельного трактора передними колесами действительный радиус поворота имеет значения при изменении скорости поступательного движения от v = 0,68 м/c до v = 1,37 м/с – Rд = 5,1–5,5 м, когда при данном режиме поворота указанного трактора в составе навесного комбинированного агрегата и соответствующих изменениях скорости он составил – Rд = 5,29–5,83 м.
Увеличение радиуса поворота МТА наблюдается на 4–% во всем диапазоне рабочих скоростей (рис. 3).
При этом значение минимального теоретического радиуса поворота – Rт = 5,061 м.
В сравнении с теоретическим радиусом максимальное увеличение действительного для трактора составило 9%, а для МТА –13%.
При повороте трактора по способу II при изменении скорости поступательного движения от v = 0,68 м/c до v = 1,67 м/с – Rд = 3,53–3,76 м. При этом режиме поворота для комбинированного МТА –Rд = 4,252–4,336 м. Отмечается увеличение радиуса поворота МТА на 13–7% во всем диапазоне рабочих скоростей (pиc. 4). При этом значение минимального теоретического радиуса поворота –Rт = 2,987 м. В сравнении с теоретическим радиусом максимальное увеличение действительного для трактора составило 20%, а для МТА –31%.
Полученные результаты подтверждают, что поворот задних колес отрицательно влияет на устойчивость движения МТА. При входе в поворот, когда «формируется» траектория участка его установившегося движения и, следовательно, действительный радиус поворота, величины и интенсивность изменения вышеперечисленных динамических факторов очень велики.
Следует отметить, что при повороте МТА средняя скорость движения незначительно выше, так как за счет большего запаса кинетической энергии лучше преодолеваются динамические воздействия микропрофиля опорной поверхности.
Траектория движения кинематического центра трактора дает наиболее полное представление о характере криволинейного движения МТА. Приведенные при исследуемых способах поворота результаты замеров параметров x и y кругового беспетлевого поворота, соответствующих траектории, описываемой его кинематическим центром, позволяют сделать вывод о том, что предложенный комбинированный способ поворота III является наиболее рациональным (рис. 5).
Из рисунка 5 следует, что комбинированный способ поворота в зависимости от скорости движения позволяет уменьшить на 0,7–1,7 м поперечное и на 2,2–2,46 м продольное смещения агрегата в сравнении со способом поворота передними колесами и соответственно на 0,27–0,53 м и на 0,6–0,9 м
в сравнении со способом поворота передними и задними управляемыми колесами. Следовательно, ширина поворотной полосы, необходимая для поворота МТА, должна быть меньше на 2,20–2,46 м в первом случае и на 0,6–0,9 м – во втором случае. Площадь поворотной полосы уменьшается в среднем соответственно на 28 и 10%.
Данные на рисунке 5 согласуются с зависимостями, полученными для минимальных радиусов поворота (рис. 3, 4) с учетом участка входа в поворот.
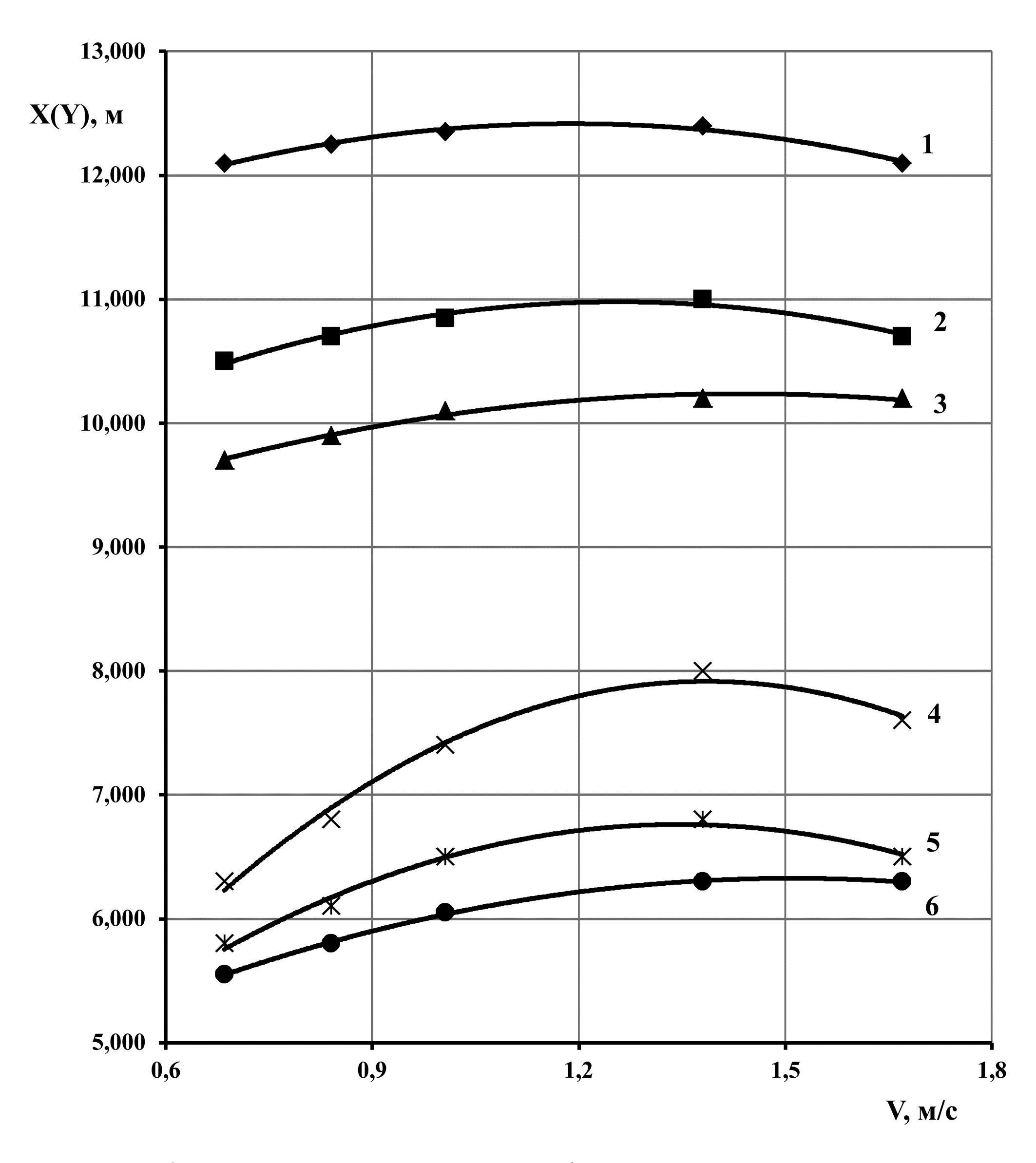
Рис. 5. Зависимость параметров кругового беспетлевого поворота от скорости
движения МТА: 1 – способ поворота I (x); 2 – способ поворота II (x); 3 – способ поворота
III (x); 4 – способ поворота I (y); 5 – способ поворота II (y); 6 – способ поворота III (y)
Таким образом, критерии устойчивости x и y, которые дают и качественную, и количественную оценку, также свидетельствуют об улучшении устойчивости криволинейного движения МТА предложенным способом поворота в сравнении с традиционными. Анализ графиков (рис. 3, 4 и 5) показывает, что при этом происходит уменьшение бокового скольжения МТА ввиду более равномерного распределения нормальных нагрузок по колесам трактора, выравнивания динамических радиусов колес, уменьшения кинематического несоответствия в приводе ведущих колес, вертикальных колебаний мостов, что способствует выравниванию поступательных скоростей отстающих и забегающих колес, меньшей их разгрузке, плавности хода, а следовательно, повышению сцепления колес с почвой, снижению интенсивности динамического воздействия микропрофиля опорной поверхности на колеса трактора в продольно-поперечной плоскости, так как на самом динамически нагруженном участке поворота – «вход в поворот» происходит движение «крабом», практически близкое к прямолинейному, и переход на участок поворота – «установившийся поворот» происходит плавно.
Более равномерное распределение касательных сил тяги по колесам трактора, снижение их амплитуд и средних значений уменьшают момент сопротивления повороту от разности касательных сил тяги отстающего и забегающего колес, за счет чего снижаются боковые силы на колесах и, следовательно, углы бокового увода шин, боковое скольжение и происходит приближение к заданной траектории движения.
Скольжение задней оси трактора при комбинированном способе поворота на рабочих режимах поворота не наблюдается, увеличивается на 7–10% скорость поступательного движения, то есть уменьшается время разворота и повышается производительность технологической операции.
Таким образом, увеличение скорости движения, массово-геометрических характеристик, ужесточение динамических процессов, происходящих в системе передачи энергии от двигателя к ведущим колесам трактора, приводят к существенному изменению кинематических и динамических свойств МТА, влияющих на устойчивость движения при работе на поворотной полосе. Наиболее эффективным для повышения устойчивости криволинейного движения навесного комбинированного агрегата на базе универсально-пропашного трактора интегральной схемы со всеми ведущими и управляемыми колесами является движение по предложенному комбинированному способу поворота.
Анатолий Иванович Завражнов, доктор техн. наук, академик РАН, профессор,
Николай Владимирович Михеев, кандидат техн. наук, профессор, ФГБОУ ВО «Мичуринский ГАУ»,
Александр Николаевич Беляев, кандидат техн. наук, доцент,
ФГБОУ ВО «Воронежский ГАУ им. императора Петра I»
Оцените эту статью!
Аргентинская технология производства инокулянтов БИОНА
