
 Архив
Архив

Робот-пропольщик поможет овощеводам
Одним из сложных процессов в овощеводстве является борьба с сорняками.
Существующие виды прополки не всегда справляются с ними. Поэтому волгоградские ученые разработали механизированное средство, позволяющее с минимальными затратами и эффективно избавляться от вредителей
Вместо тяпки – робот
– При возделывании овощных и бахчевых культур одной из трудоемких и энергозатратных операций является прополка сорняков, выполняется она в основном культивацией или вручную (особенно в теплицах), – поясняет один из разработчиков уникального робота-пропольщика, кандидат технических наук Наталья Воробьева. – Однако они не всегда эффективны, поскольку при механическом уничтожении сорняков рабочие органы-лапы культиватора обрабатывают только междурядья, а в самой грядке они остаются, и порой забивают культуры. К тому же, чем больше возделываемое растение, тем больше вероятность его повреждения при сплошной культивации междурядий.

Химические же способы, по ее словам, сейчас используются реже по экономическим и экологическим соображениям. В связи с этим возникла необходимость внедрения высокоэффективных средств механизации и роботизированных систем для возделывания сельхозкультур, которые позволят исключить ручной труд и травмирование растений. У ученых из волгоградского аграрного университета возникла такая идея, они ее долго вынашивали, и в результате придумали робота-пропольщика для точечного удаления сорняков.
На это понадобилось целых два года и грантовая поддержка российского фонда фундаментальных исследований. В этом проекте принимали участие Иванов А.Г.(аспирант), Воробьева Н.С. (к.т.н., зав. каф. «Механика»), Жога В.В. (д. физ-мат. н., профессор каф. «Механика»), Несмиянов И.А. (д.т.н., декан ИТФ), Дяшкин А.В., (к.т.н., доцент «Механика»), Дяшкин-Титов В.В. (к.т.н., доцент «Механика»).

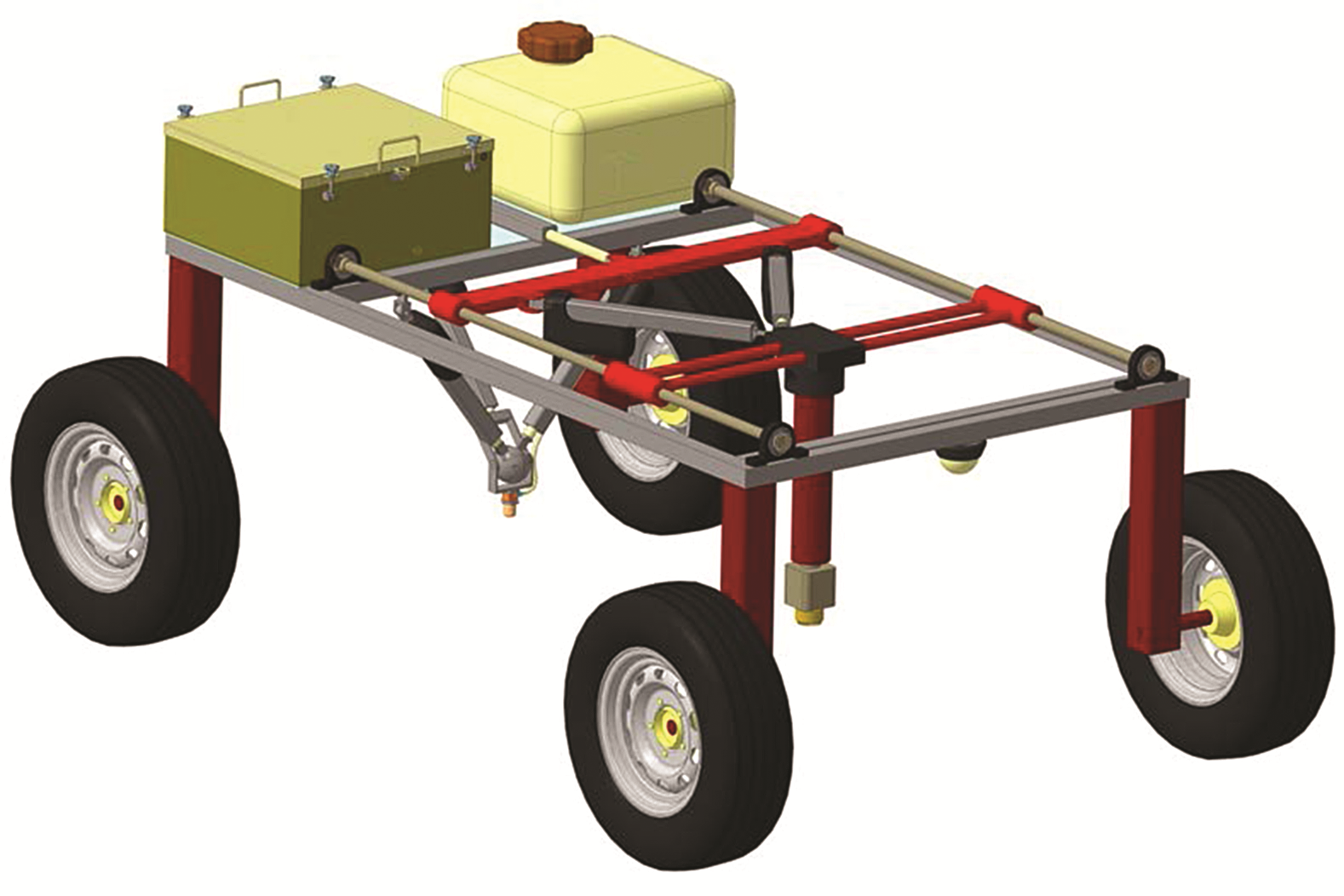
– Конструкция состоит из рамы, управляемых колес, системы управления и навигации с контрольно-измерительными приборами, системы питания, линейных приводов и датчика технического зрения, – говорит Наталья Сергеевна. – Для перемещения рабочего органа используются линейные приводы (электроактуаторы), три – в горизонтальной плоскости и один – в вертикальной. Вращение рабочего органа осуществляется с помощью двигателя.
Это небольшой агрегат – его габариты составляют 1100x800x850 мм, масса 50 кг, максимальная нагрузка 300 Н, транспортная скорость 20 км/ч, а рабочая – 5 км/ч. Он с электрическим типом привода (электропитание 12 В). Такая машинка может применяться как в агропромышленных комплексах, где выращивают овощные культуру в закрытом грунте, так и в маленьких хозяйствах, в полевых условиях. Оригинальность технической идеи подтверждена патентом РФ на изобретение.
Перспективная разработка
– В автоматическом режиме робот-пропольщик уничтожает сорняки в рядках и междурядьях, а также рыхлит почву рядом с ними, обеспечивая дополнительно кислородное питание к корням растений и лучшее поступление влаги, – рассказывает Наталья Воробьева. – Точечная обработка позволяет повысить качество прополки и снижает травмирование овощных культур. Работает агрегат следующим образом. С помощью системы управления и навигации робот-пропольщик заезжает в рядки с растениями, система технического зрения определяет координаты расположения сорняков и в автоматическом режиме рабочий орган манипулятора перемещается к нему. Когда режущий инструмент рабочего органа находится над сорняком, он перемещается вертикально, срезает его и взрыхляет почву рядом.

Оказывается все легко и просто. Минимум затрат на весь процесс прополки и никакого вреда для самих растений. Помимо этого есть и масса других преимуществ. В частности, высокая степень автономности за счет интеллектуальной системы управления, низкая металлоемкость, более качественная прополка рядков и междурядий, снижение травмироваемости культурных растений, отсутствие вредного воздействия на окружающую среду за счет использования электрического привода. Не забывайте и про экономический эффект – повышение производительности и качества работы.
– Пока у нас только один экземпляр робот-пропольщика и он находится в стадии доработки. На данном этапе проводятся его лабораторные испытания, – поясняет ученый-разработчик. – Для массового выпуска он должен быть испытан в полях в течение определенного времени. Агрегат мы пока не показывали аграриям, потому что дорабатываем его, но схему и принцип работы обсуждали со специалистами сельхозпроизводства. И робот вызвал у них неподдельный интерес, а значит, будет пользоваться спросом.

Как отметила Наталья Воробьева, современные механизированные роботы оснащены солнечными батареями, поэтому в дальнейшем планируется установить на волгоградский робот-пропольщик солнечные батареи, усовершенствовав тем самым систему питания, что позволит долгое время работать на участках открытого грунта.

– Пока это только научная разработка, но у нее есть перспективы и ее можно внедрить в сельское хозяйство, – резюмировала она. – Кстати, на Всероссийской агропромышленной выставке «Золотая осень-2019», в Москве нашего робота высоко оценили, и он завоевал золотую медаль.
Лариса Алексеева
Оцените эту статью!
Аргентинская технология производства инокулянтов БИОНА
