
 Архив
Архив

Приоритетные направления роботизации процессов на молочных фермах
Предложен путь их роботизации с учетом организационных форм производственных процессов молочно-товарных ферм Российской Федерации. Дано краткое описание принципов работы перспективных инженерных решений для отечественного молочного животноводства.
В последние годы на мировом рынке доильного оборудования активное продвижение получили автоматические системы доения. Основная доля доильных роботов (с двумя боксами) закупается животноводческими предприятиями со средним размером поголовья 120 коров. Однако эти системы нашли применение не только на малых и средних фермах, в настоящее время они устанавливаются и на больших предприятиях с поголовьем животных более 1000 голов.
Концепция конструктивного исполнения доильных роботов за последнее время несколько изменилась. На рынке предлагаются автоматизированные установки четырех типов:
- доильный робот состоит из одного доильного бокса, обслуживаемого одной рукой-манипулятором;
- система включает в себя два параллельно установленных доильных бокса, обслуживаемых размещенной между ними одной рукой-манипулятором (может состоять из одного доильного бокса);
- доильный робот выполнен в виде модуля с двумя сблокированными параллельными доильными боксами, обслуживаемыми одной рукой-манипулятором;
- роботизированная система состоит из нескольких доильных боксов, смонтированных один за другим (тандемного типа) и обслуживаемых одной рукой-манипулятором. Наибольшее распространение получили однобоксовые доильные роботы.
Практика показала, что в целом работа автоматизированных доильных систем не вызывает нареканий. В то же время существует ряд проблем, сдерживающих их широкое применение на молочных фермах России. Анализ работы доильного робота Astronaut A4 компании Lely (Нидерланды) позволил выявить как положительные, так и отрицательные стороны его эксплуатации на молочных фермах нашей страны (см. таблицу).
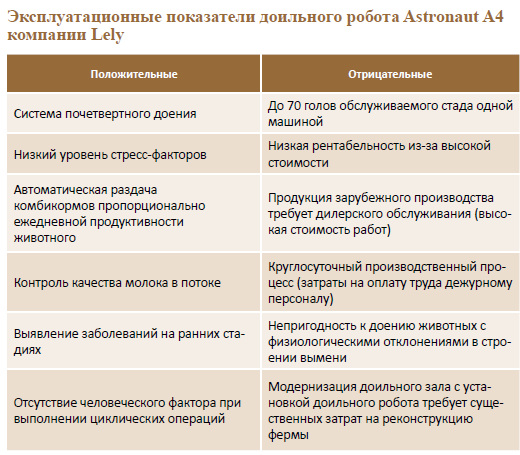
В результате анализа производственного процесса на молочной ферме, оснащенной автоматизированной доильной установкой, установлено, что большинство отрицательных факторов ее применения обусловлено высокой стоимостью и длительным сроком окупаемости.
В технологическом плане система почетвертного доения, раздача комбикормов пропорционально продуктивности животного, автоматическая установка количества суточных доений в зависимости от периода лактации оказывают положительное влияние на эффективность содержания животных, продуктивное долголетие и профилактику заболеваний.
Учитывая специфику молочного животноводства нашей страны, где преобладают фермы с относительно большим поголовьем молочного скота, роботизация процессов доения не всегда может оказаться эффективной. С учетом обслуживающих возможностей доильного робота (до 70 голов) становится понятным, что данное технологическое решение актуально лишь для малых фермерских хозяйств, владеющих большим количеством денежных средств. В свою очередь, большая часть отрасли молочного животноводства России сформирована на базе молочно-товарных ферм с поголовьем от 400 дойных коров, на которых применяются доильные залы типа «Ёлочка», «Тандем», «Параллель» и «Карусель». Большой интерес представляет модернизация этих установок с использованием унифицированного доильного модуля, оснащенного системой почетвертного доения и контроля качества молока. Это позволит снизить заболеваемость коров маститом и получить высокое качество молока.
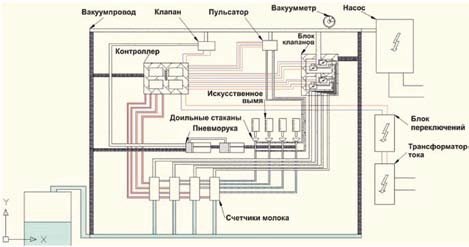
Основными управляющими органами доильной установки будут счетчик-датчик молока, осуществляющий контроль молокоотдачи каждой четверти вымени, и контроллер (блок управления), обрабатывающий данные процесса доения. Доильные стаканы управляются посредством автоматического манипулятора, оснащенного системой точного позиционирования в пространстве.
Создание унифицированного доильного модуля отечественного производства позволит осуществлять модернизацию существующих доильных залов и оснащать новые фермы современным технологическим оборудованием с учетом специфики организации отечественного животноводства.
На рис. 1 представлена принципиальная схема доильной установки.
Удаление навоза из животноводческих помещений – один из наиболее трудоемких процессов на ферме. Для снижения затрат труда и обеспечения качественной и своевременной уборки в животноводческих помещениях за рубежом были разработаны автоматизированные системы навозоудаления. Однако все навозоуборочные роботы зарубежного производства выполняют уборку навоза только с поверхности пола помещения или проталкивают его в щелевые полы.
Для повышения эффективности применения подобных машин на отечественных фермах представляется целесообразным создать один многофункциональный агрегат, выполняющий несколько операций: очистка стойл, замена подстилки и пододвигание корма. Бункер такого агрегата может быть адаптирован под раздачу комбикормов. Данная машина позволит значительно сократить затраты ручного труда на выполнение указанных операций.
В конструктивном исполнении такого агрегата можно будет учесть различия в планировке коровников, особенности конфигурации и габаритные размеры навозных каналов и кормовых столов, после задания параметров которых, а также необходимого расхода подстилки (или кормов), времени дойки животных по секциям блок управления робота с помощью программного обеспечения определит необходимые для эффективной работы оптимальные значения скорости движения и частоты вращения рабочих органов.
Общее время работы многофункционального робота на уборке навоза можно определить из выражения:

где L0 – длина стойл, требующих очистки, м;
В0– ширина навозного прохода, м;
v – средняя скорость движения робота, м/с;
n – количество разворотов, необходимое для переезда в соседний навозный проход;
tp– время разворота машины, с;
m – количество переездов робота в соседний навозный проход;
B1 – расстояние переезда в соседний навозный проход, м.
Работу навозоуборочного робота в условиях беспривязного содержания с доением в залах нужно синхронизировать с выводом животных на доение. Например, имеется четырехрядный коровник, в котором животные условно разделены на несколько дойных групп, чтобы была возможность полностью освободить секцию для работы робота. Тогда выражение для определения времени работы в одной секции будет иметь следующий вид:

где Тсекц – время работы в одной секции, с;
L0 – длина секции, м.
При этом должно соблюдаться условие: где Тсекц. ≤ Тд , где Тд – время доения животных, расположенных в одной секции, с.
Из приведенных выше формул можно определить минимально необходимую скорость работы робота.
В навозоуборочных каналах в зависимости от схемы его движения. В качестве примера используем схему движения робота в определенном коровнике с четырьмя секциями (рис. 2).
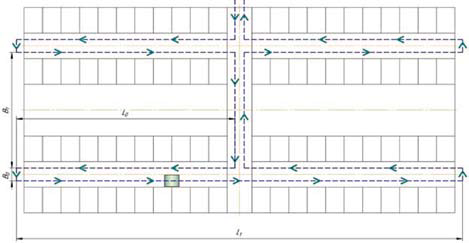
С учетом выражения (2) имеем:
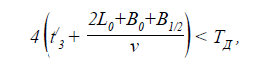
t3 – время на заправку, зарядку и развороты в коровнике, с.
Из приведенного неравенства можно выразить скорость движения робота:

Расчеты показывают, что при следующих исходных данных:
Т=4,5ч=16200 с; t3 =30 мин= 800 с; L=50 м; В0=2,5м; В1=12 м поступательная скорость робота должна быть не меньше
При пододвигании кормов или их раздаче необходимо выбирать более рациональный скоростной режим, чтобы как можно больше продлить автономную работу робота без подзарядки.
В настоящее время на большинстве ферм используют раздатчики-смесители кормов, с помощью которых раздают не менее 70% концентратов. Остальную часть (особенно в период раздоя) коровам раздают на доильных установках или вручную. Для этих целей ряд зарубежных фирм выпускает небольшие ручные тележки с механизированной раздачей концентратов с приводом от аккумулятора. Выполнение этой операции предусмотрено на разрабатываемом устройстве. Данная операция по длительности приблизительно аналогична уборке в секции и пододвиганию кормов на кормовом столе:
где Тк.к – время раздачи подкормки, с;
Тпод.к – время пододвигания кормов, с;
Тсекц. – время работы на одной секции, с.
Операция по раздаче кормов может осуществляться совместно с их пододвиганием.
Загрузка робота осуществляется автоматически (без участия персонала) путем опускания ковша-бункера и включения заднего хода. Затраты времени на выполнение этой операции можно определить из выражения:
где Lб-к – расстояние от базы до кормохранилища или хранилища подстилки, м;
toп.к – время опускания ковша, с;
lз.x. – расстояние заднего хода, м;
vз.х – скорость заднего хода, м/с.
Зарядка робота осуществляется на базе. Время зарядки будет зависеть от объема аккумуляторного блока и энергоемкости выполнения операций до приезда на базу, т.е. от количества оставшегося заряда батарей аккумулятора.
Выводы
- Использование унифицированного доильного модуля отечественного производства позволит производить модернизацию существующих доильных залов и оснащать новые фермы современным технологическим оборудованием с учетом специфики организации отечественного животноводства.
- На отечественных фермах представляется целесообразным применять один многофункциональный агрегат, который выполняет несколько операций: очистку стойл, замену подстилки и пододвигание корма.
Л.П. Кормановский,
д-р техн. наук, акад. РАН,
Ю.А. Цой, д-р техн. наук,
проф., чл.-корр. РАН,
В. В. Кирсанов,
д-р техн. наук, проф.,
Е.А. Никитин, инженер,
В. С. Рузин, инженер,
ФГБНУ ФНАЦ ВИМ f
Оцените эту статью!
Аргентинская технология производства инокулянтов БИОНА
